Description
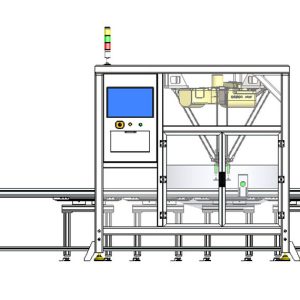
By using structural configurations such as induction variable distance fixtures, top capping machines, and truss robotic arms, the automatic application of top and bottom capping and bottle filling in the glass container grilling process can be achieved, completely replacing manual precision in grasping, placing, top capping, and bottom capping operations.